既可静态补偿定位误差,也可用于铣削等动态加工过程中的路径误差补偿,适配各种类型的工业机器人,提高机器人的绝对精度,并在动态负载的影响下实现工业机器人的高精度加工。
机器人在直接进行加工的过程中,定位误差或屈服性等原因机器人工具中心点(TCP)会偏离程序中的理论位置,由于安装刀具的主轴是固定的,此时刀具和工件的相对位置发生了偏差,从而造成加工误差。工作原理是同步微调主轴位置,补偿机器人位置误差,将工件/刀具相对位置修正回到更加接近程序设定值,降低加工误差。
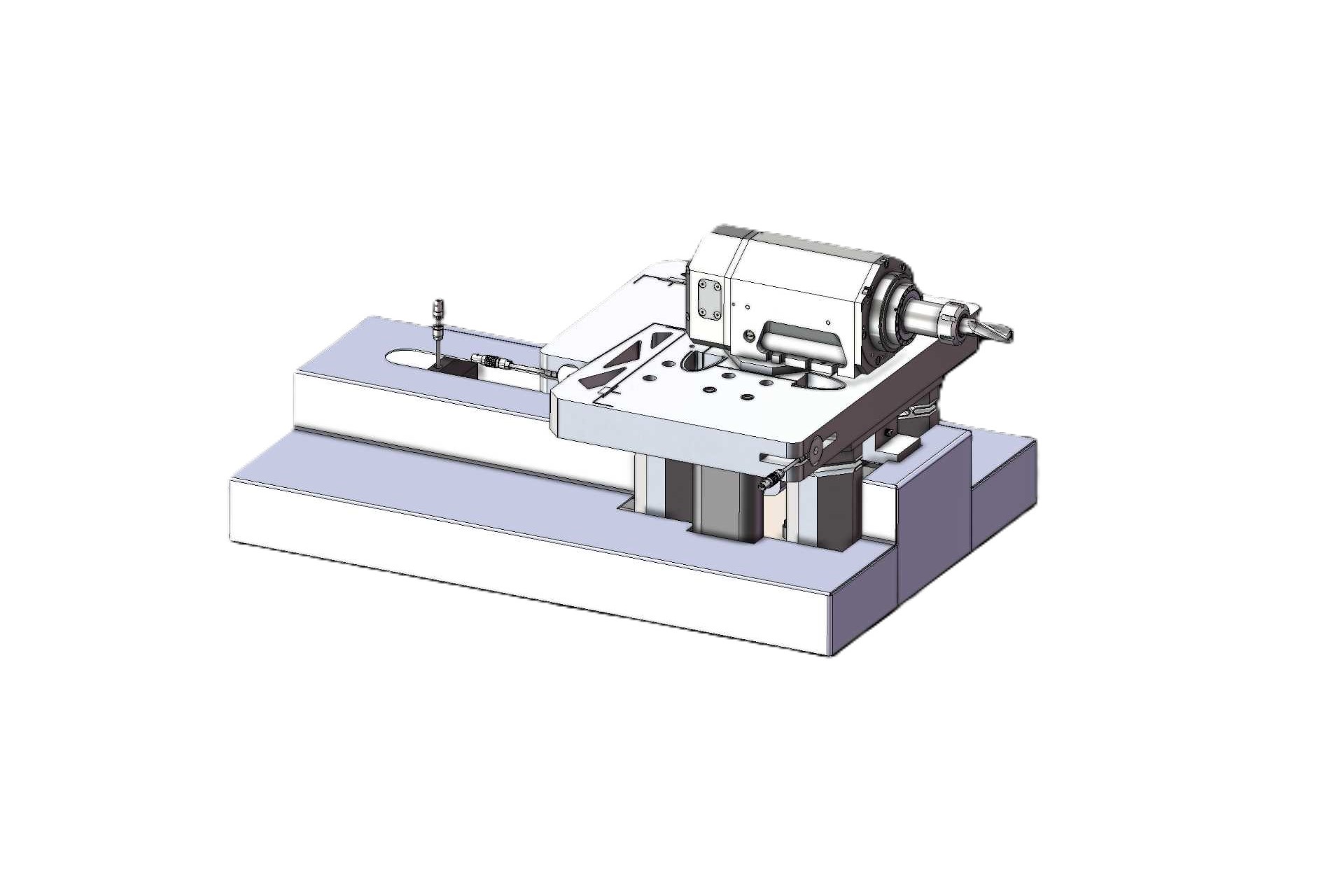
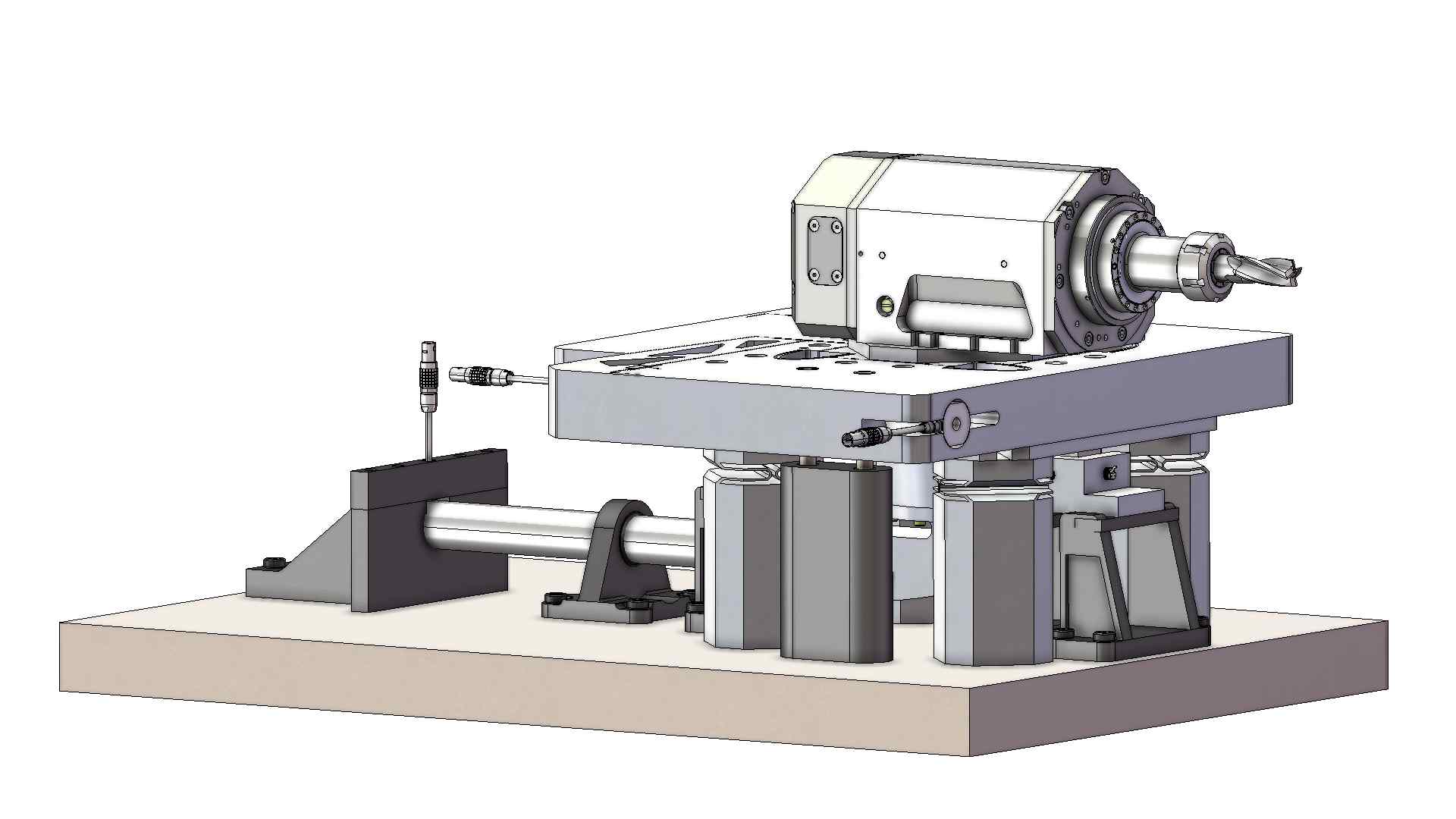
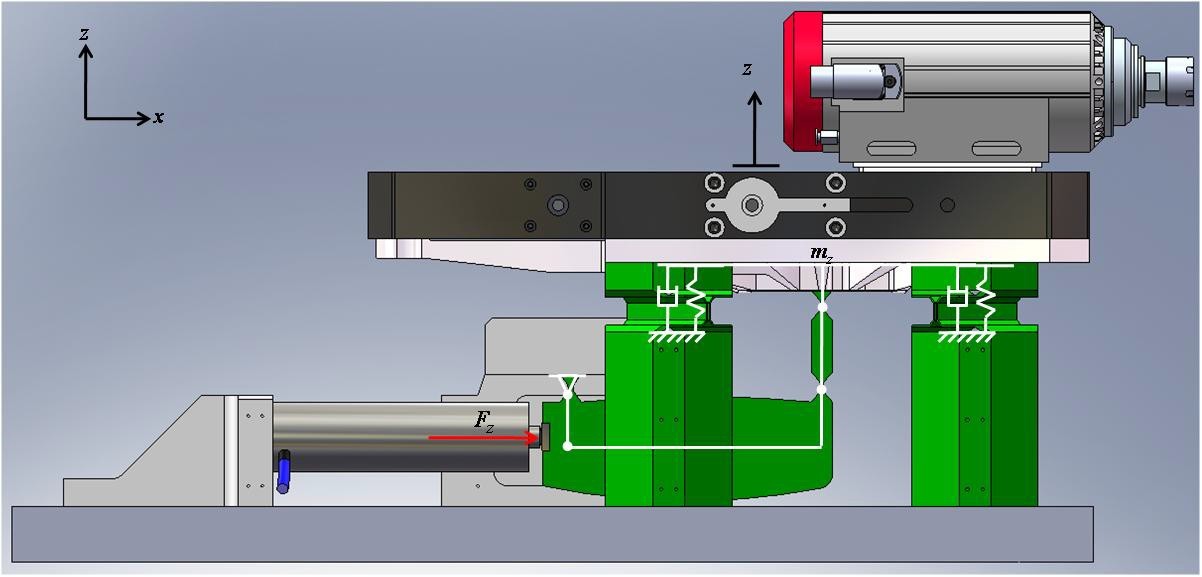
机器人加工过程中实时产生三维空间中的位置误差,因此需要微动机构在三个方向微调加工主轴的位置,对机器人的误差实时校正补偿。自适应补偿机构需要减轻每个方向上的移动质量并增加动态性能,在三个方向更加快速响应并完成补偿动作。基于并行而非串行驱动的方法,设计了三个方向平移微动的压电补偿机构,压电促动器与杠杆传动机构相结合,确保补偿运动能够达到适合于机器人加工要求的动态和刚性。
自适应微动补偿由压电陶瓷促动器驱动,选用高负载堆叠型压电陶瓷促动推杆,具备更高的致动力和机械刚度,更加匹配驱动自适应补偿机构。压电致动也存在一些限制,比如只有10至数百微米之间较小的行程,随着行程增加制造和采购成本会变得非常高昂。另外压电陶瓷本身是脆性的,必须避免拉伸和剪切力。三个方向的压电推杆都通过相应的设计措施防止其承受剪切力。为了保护压电陶瓷,运行时对推杆进行预拉伸,以避免其承受任何拉伸载荷。所有压电促动器都内置应变计,确保每个方向的促动位移与系统所需的理论驱动位移一致。
机器人位置误差通常在0.1~0.5mm量级,高于常规压电促动器的最大行程,执行机构的补偿量必须达到同样的范围。为此压电推杆的驱动将由具有一定传动比的传动机构来扩大到所需位移范围。与传统的机械或液压传动相比具有更多优势,更加适合于机器人加工补偿的微动调节。