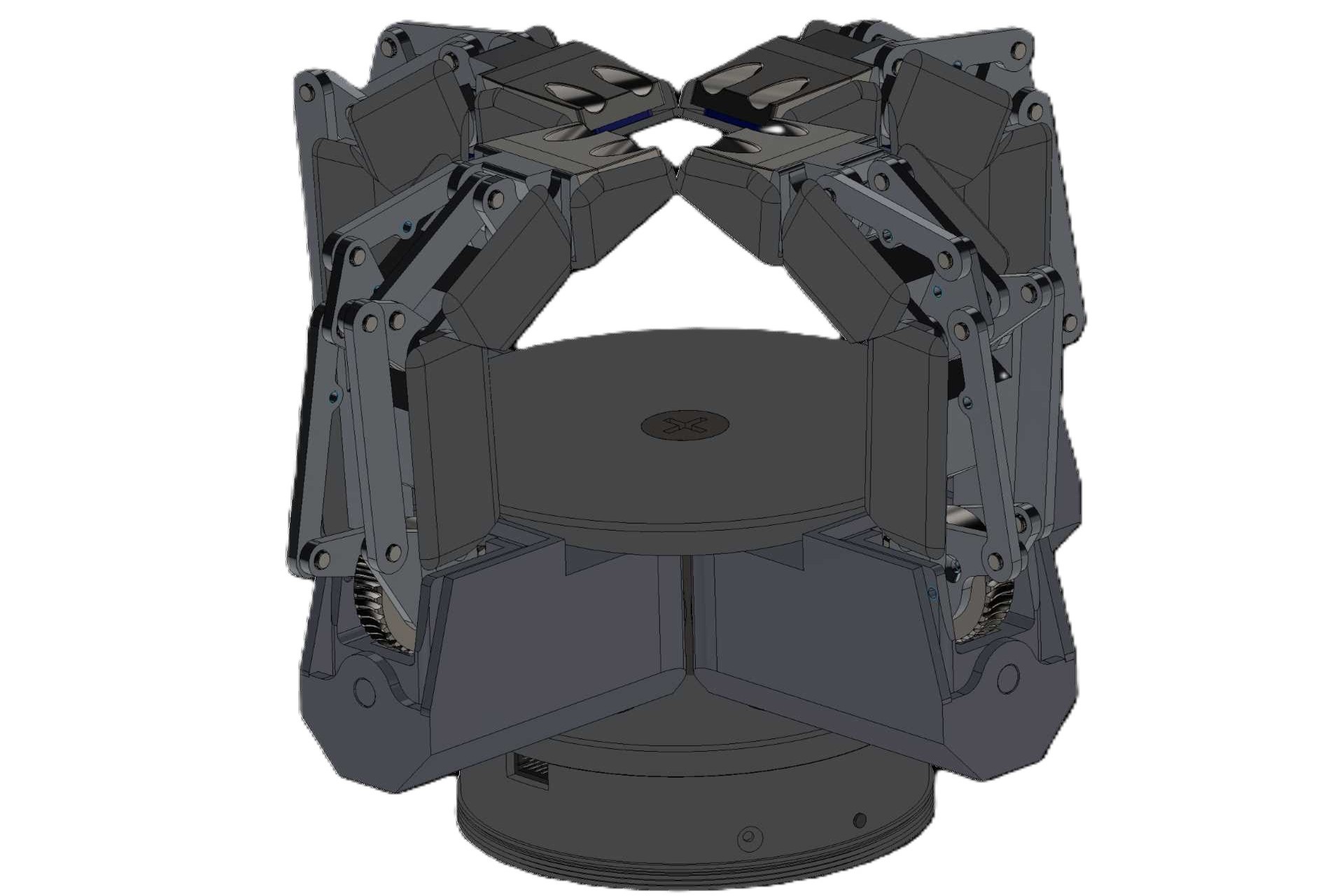
多关节自适应的灵巧型机械手,采用了欠驱动连杆结构指节,可以自适应不同外轮廓抓握物体
抓握时最大程度自适应贴合物体外表面,不需要特定设置每个手指关节的角度。
手指组件可以摆动回转,形成各种姿态,更具适应性的抓握特定类型物体。
第一阶段:预抓握运动。手指还未接触到被抓物体,整个手指是一个单旋转自由度的连杆机构;第二阶段:当近指节接触到被抓物体时固定定,中指节和远指节继续运动完成对物体的包络。